20230401

This is not the ideal configuration because the pixhawk is too close to the jetson nx.
20230401
This is not the ideal configuration because the pixhawk is too close to the jetson nx.
Mounted MD design onto the sub and confirmed that it fit properly and did not interfere with other sensors or cameras. Tested MD design underwater and it worked. Used golf balls as markers and when released by control arms they would drift and not land in the designated location. Tested a new 3D printed control arm and it worked.


Test fitted servo and mounts. Created a test bench using an arduino for performance verification.
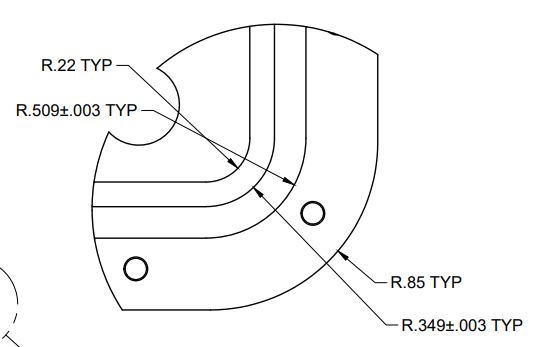
Parker handbook 4.3 Face Type Seals “Face type seals are sometimes rectangular. In designing such a seal to receive a standard O-ring, th...