Colin Szeto

The aluminum interface plate was duplicated 3 more times for all of the legs of the prototype boat
Colin Szeto
The aluminum interface plate was duplicated 3 more times for all of the legs of the prototype boat
Colin Szeto
It was only a matter of time when the acrylic interface plates were dropped on the floor and snapped
The team pivoted to utilize the aluminum 6061 plates we had on hand.
The hole pattern was printed on 1:1 scale onto an 8.5” by 11” piece of paper. The design was then cut out and attached to the plate. This allowed the team to center punch accurately and maintain tolerances with only a drill press
Hello coach Alex and everyone,
I wanted to give you all a quick little update on where things are at with the manipulator system. There are pictures attached so you have an idea of what I am working on.
Basically, the manipulator system will utilize this mechanical magnet called a mag-switch which essentially turns the magnet off and on at a turn of a knob (video of it in use attached). The system will use the servo to turn this knob.
I am currently designing the mount for the system which will hold the servo and the knob together on the drone. I have finished the lower part that will hold the mag-switch in an easy-to-remove section that will be held by two latches so that the mag-switch can be easily removed and cleaned to prevent any rusting that could possibly happen after use. I am currently in the process of designing the main top body of the manipulator which will house the servo and a downward-facing camera and will attach to the drone mounts.
Speaking of the drone mounts, I have created a redesign of the mounting system for the drone which will use rails and pins to hold the camera and manipulator closer to the main body, this should help its maneuverability in the air. However, having made this change using the holes already on the frame the camera will sit towards the front of the drone rather than in the center. Hopefully, once I finish the manipulator things should balance out since it will be attached to the back two rails; but I may make some adjustments to attend to this problem.
Regarding materials, the rails will be aluminum and the manipulator will most likely be printed using ABS material (unless I find a stronger alternative). Otherwise, please let me know if you guys have any questions or thoughts on this new rail system and the manipulator system.
Also, I would like to let you guys know that I will be gone on a family camping trip starting tomorrow for a week, so I will not be able to work on this during that time but I should be able to finish things once I get back. Either way, I will still be able to answer any questions you all may have in the meantime.
Other than that, I hope all of you guys have a good weekend.
Colin Szeto
Side view 2 plates, 4 spacers
2 1020 bars
4 4138 gussets
Utilizes the same motor mounting structure for the front vectored plates
Notice the flat head m4 screws enables a flat alignment of the interface plate with the back of the mounting plate of the pontoons
Back vectored thrusters and front vectored thrusters on the WAM-V
Bottom view of the thruster configuration
See an animation of the thrusters here
Colin Szeto
In steel
Aluminum 6061
with 315N perpendicular to the mounting bar
Aluminum 6061
with 315N at a 45 degree angle from inside
Mounting plate onto the 2020 bars (2 in by 2 in bar) with a 1020 bar (1 in by 2 in) and three 1010 bars (1 in x 1 in bars). Allows ample support for the plate.
Colin Szeto
With steel about 3 ft the frame had a factor of safety of 10 from 315.824N applied on a 45 degree angle to the bottom bar
Factor of safety of 14.58 with same configuration as above
Utilizing 6061 aluminum
80/20 is 6105 aluminum
Comparison here
Assumptions:
No Gravity
Bodies are solid
No weak points from screws
The fitment of the 10 series 80/20 gusset was the inspiration of using all 80/20 components to mount the thrusters onto the skis
The front frames mounted to the WAM-V skis.
Colin Szeto
The diagrams below represent a side view of the perception mount resting on the base of the motor mount structure.
Before:
Side view representation of the perception mount. Only tied in with bungee cords. The bottom base had freedom to move
After:
Added in 90* corners to bottom rail of the motor frame to ensure that the perception structure would not wobble back and forth on the boat
Attached the Velodyne Puck 16 and an Oak-D Lite onto the top of the perception frame.
Colin Szeto

The vertical tubes used as landing gear will be placed closer to the center of the platform and attached to the horizontal drone arms

Here is an exploded view where there are 2 plates sandwiching 4 aluminum tube clamps. 2 tube clamps clamp onto the horizontal drone arms. 2 tube clamps are dedicated to the vertical drone landing legs
Colin Szeto
Initial design required many specific 80/20 cut lengths. No obvious way to remove perception mount from the motor frame for transportation
Final design - using on hand 2x4 wood pieces. Strapped onto the motor mounting frame
Construction of the perception mount. Utilized extra 80/20 corners bracket for the joinery of the ends of the frame
Alright guys, I got the suction cups as well as the tins earlier today. I just did a couple of simple tests:
- Out of the box suction cup works very well to pick up the tin (haven't tried with a lot of weight but as far as I can tell it takes a lot of strength for the suction to lose hold)
- The suction can lift the tin when it has the sticker stuck onto the top (I assume this is what will be colored)
- The suction can lift the tin when wet (both sticker and tin)
Issues I found:
- When trying to release the tin the suction keeps the tin attached (which makes sense)
-- I have found, however, that something pressing on the sides of the suction cup allows the suction cup to pick up the tin but it also allows it to drop the tin so should be an easy fix.
- The main problem however, either has a rubbed off sticker (as in it is rubbed after getting wet making it rough and that weird soft residue) then it can't pick the tin up at all
-This is a problem because depending on how the tin is colored it could cause issues with the suction, especially if the sticker is painted and begins to rub off overtime, or if the paint they use isn't very smooth
-Now assuming that they use waterproof stickers that are smooth then we have zero problems and all should work well, or if they use similarly colored tins that are painted smooth then we are good
-- Now if you guys believe we should be fine and that we trust that the tins they use are gonna be smooth and well colored then I am fine going with this design, however, I may actually create a passive claw design that should work just as well or better, which will make all these problems obsolete, the only thing is it would be a bit more complex to make but it still shouldn't be too bad. This claw should work pretty well because the edges of the tin should be very easy to grip onto and an almost claw machine like claw could work pretty well if it's an actual strong one and not like one of those weak ones, trust me I'll make sure it's strong. I'll do a bit more design work tomorrow and think try to sketch up some possible designs for the claw and I'll update when I can
Little vid of the suction cup working
Lindsay Wright
Setup procedure
-setup gps home on tripod
- connect battery wire and power on *very carefully*
-calibrate compass
Guide is CubePilot and ArduPilot
Here1 manual
Enter some parameters based on these guides
Reboot
Disconnect something (on computer program), go to setup
Open QGroundControl
Setup drone
Rotate all over place after beep
A) 360d 1 direction upright
B) 360d other dir upright
C)point antenna towards you, rotate 360d
D) “baby roller coaster” (rotate while gently spinning drone in random directions)
Unscrew knobby screws to engage arms
Screw to lock
CCW blade
CW Blade
Mount on drone:
Gold brass ring (DO NOT LOSE)
Rotor
Steel wheel shape
2 screws
Quadcopter formation: front in, CW rotors in diagonal
Weak points: arm (mech), battery (elec)
Level calibration
Video coming soon!
Calibrate gyro by pushing a button
Overrode safety checks
Flying the drone: manual under 50% throttle, hold position 50% throttle is hover
Battery: 25.2V is full 22.2V is empty
Successful flight of 20 minutes, moving around, for 4.5 kg drone
Need to test with payload of camera and grabber
Coach Alex says the drone is on the heavy side and doesn’t leave much margin for payload.
Colin Szeto
The team was able to utilize past land vehicle design game pieces from FIRST Tech Challenge Relic Recovery
.png "bottom of mounting plate")
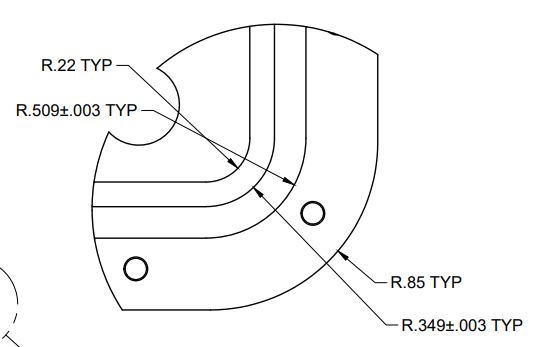
I printed out a 1:1 sheet of the bottom of the racquet ball turret plate.
.png)
This template was used as template to center punch and drill the interface holes the plate and the racquet ball launcher.
Final through holes
Objective: Utilize the servo block as a mounting solution for the servo. Using servo programmer here to enable movement of the HSI camera cart without programming
In this design, the cheese slope was redesigned to mount 3 pieces to support a vectored continuous rotation servo onto the Camera Cart.
Isometric View
Top View
Front View
Side ViewAssembled 3d printed parts of the HSI cart all together
Mount rolling freely on the rail hereColin Szeto
Inspiration for this design came out of farm pivots that are used to water crops in a radius around a pivot point. This allows the team to add on a yaw motion to our racquet ball launcher. This was the final update we needed to do before the Mechanical system was complete and ready for the programmers to program.
front view
Side view
Top view
ISO view
Animation of the turntable yawing
.png "turn table mechanism")
The sprocket will be flat on the floor
.png)
This is the turntable system that was used in FTC Freight Frenzy 2021-2022 season
The motor connected to the turntable will be connected to the rev bars underneath the shooter
The main sprocket will be stationary and the motor will rotate with the launcher assembly
ISO view of launcher on a plate
We can mount the turntable onto a base plate to ensure that when the motor spins, the shooter is the component that turns and not the base of the turntable.
Parker handbook 4.3 Face Type Seals “Face type seals are sometimes rectangular. In designing such a seal to receive a standard O-ring, th...