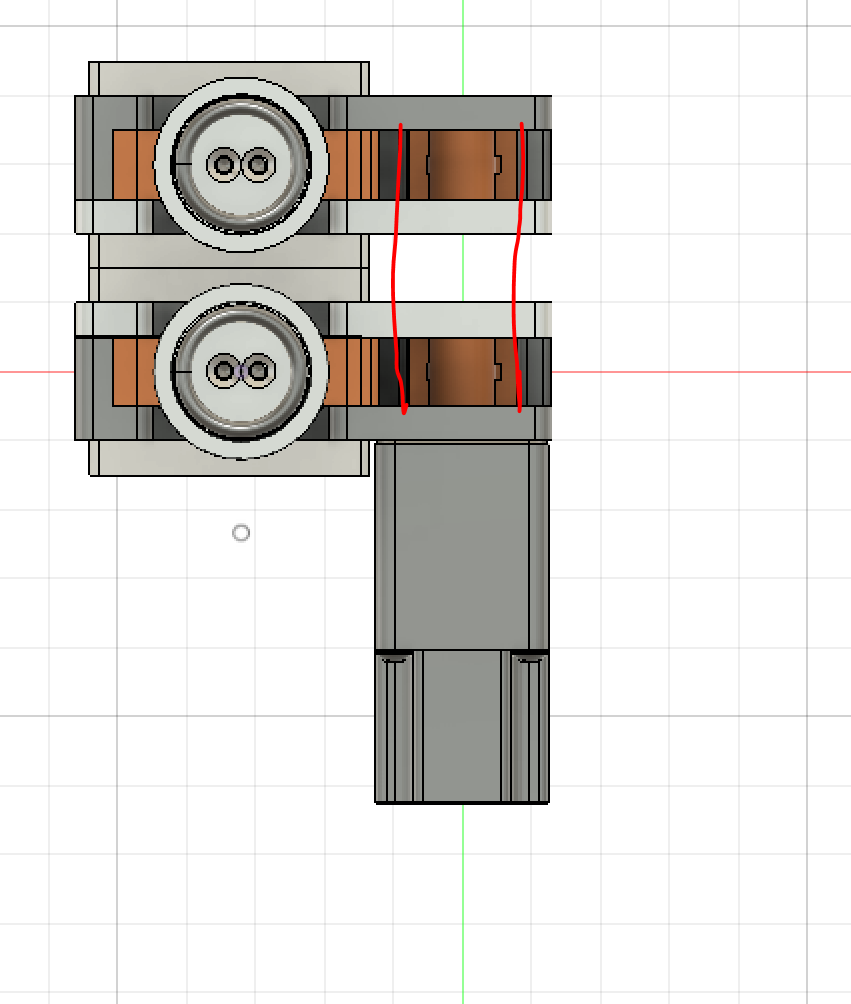
Dual Firing the torpedo

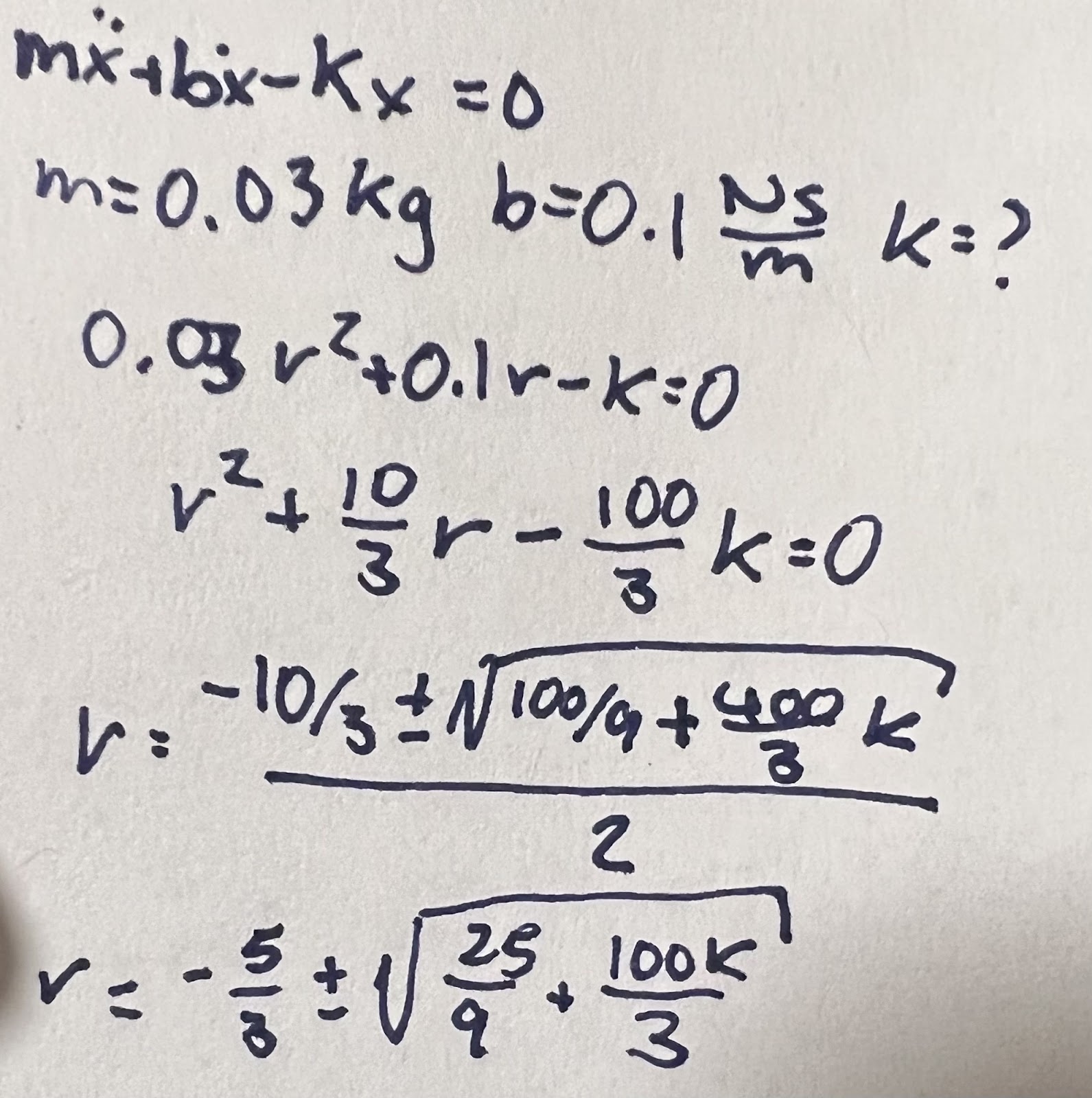
Initial Torpedo Spring Calculations
Feb 23 2023
Worked backwards from a desired distance making the following assumptions:
We want the torpedo to travel 0.5m or about 20” 0.2m or about 8”
Torpedo mass of 10g
Compression of the spring by 1 cm or 0.01m
Damping/drag coefficient of 0.1
Sources indicate a streamline shape has a drag coefficient of 0.05; to compensate for it being in water, having fins and other factors I doubled the number
Calculations redone in next table










close all; clear; clc;
% Lindsay Wright
% RoboSubSpring.m
% State Space for Spring and Water Damping
% Last Modified: 2/25/23
%Some assumptions: a drag coefficient of 0.01 Ns/m, pushback of 1 cm at the
%start
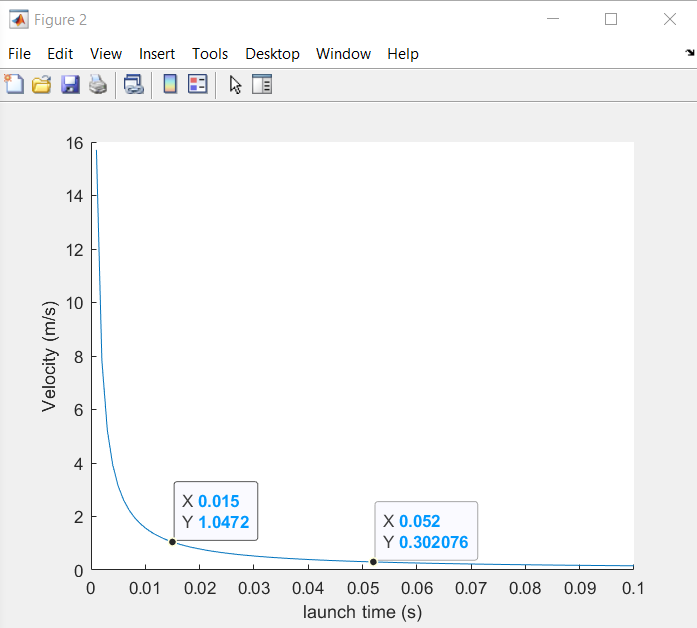
t=0.001:0.001:0.1;
kPlot=zeros(1,length(0.005:0.005:0.5));
vPlot=zeros(1,length(0.005:0.005:0.5));
for i=1:length(t)
kPlot(i)=((pi/2/t(i))^2+25)/100;
vPlot(i)=(pi/2)*0.03/t(i)*exp(-5*t(i)); %changed 0.01 kg to 0.03 kg
end
desired_travel = 5; % in meters
diff_val = abs(desired_travel*ones(1,length(t))-vPlot);
index = find(min(diff_val) == diff_val);
%index = find(vPlot == );
figure
hold on
plot(t,kPlot)
plot(t(index),kPlot(index),'LineStyle', 'none','Marker','o','MarkerSize',5,'MarkerFaceColor','red','MarkerEdgeColor','none')
hold off
xlabel('launch time (s)')
ylabel('Spring Constant (N/m)')
figure
hold on
plot(t,vPlot)
plot(t(index),vPlot(index),'LineStyle', 'none','Marker','o','MarkerSize',5,'MarkerFaceColor','red','MarkerEdgeColor','none')
hold off
xlabel('launch time (s)')
ylabel('Velocity (m/s)')
table=zeros(3,length(t));
table(1,:)=t;
table(2,:)=kPlot;
table(3,:)=vPlot;
%disp(table)
fprintf('need: %07.4f N/m or %08.4f lb/in to travel: %07.4f meters\n',kPlot(index),kPlot(index)*8.8507457676,vPlot(index))
20230301
Calculations redone to account for differences in mass. Also realized I made an error in calculating the roots of the characteristic equation, yielding a smaller spring constant than expected.





Subscribe to:
Comments (Atom)
20230508 Tuning In the O-Ring Size
Parker handbook 4.3 Face Type Seals “Face type seals are sometimes rectangular. In designing such a seal to receive a standard O-ring, th...
-
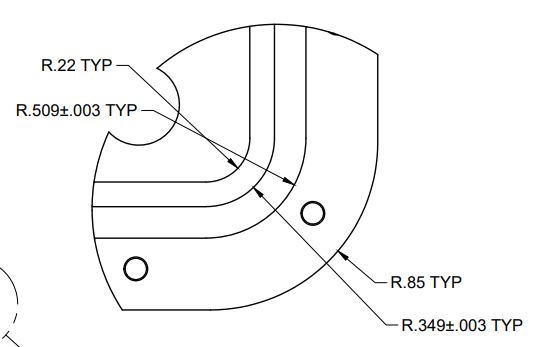
Dovetail designs were implemented into the design to enable manufacturing on the 256 mm x 256 mm by 256 mm build volume of Bambu-X1 Carbon...
-
Quick release Clip + pin, when gripper closes, clip gets pushed back, gripper drops Straight snap pin: Kinda short, not sure if pla will be...
-
Dual Firing the torpedo Connect to one axle, out of phase by 90 degrees Potentially change this linkage to a CAM (would require spring to ...

