Taking inspiration National University of Singapore Bumblebee’s 2022 gripper
Create bevel gears with 2:1 gear ratio (40 teeth to 20 teeth)



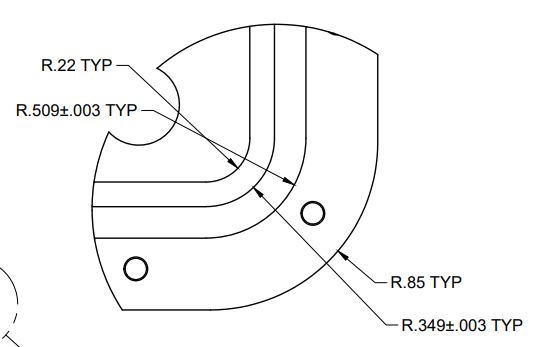
Design claw shape roughly based on Bumblebee. Angles and length are pretty arbitrary but can be defined later. Also claw shape could be completely different to fit game piece geometry more (will work on coming up with different claw shapes/make edits as the 2023 game piece is revealed).

Extrude, cut out slots, and joint claws together. I still need to add tolerance in between the claw slots.


Next, need to figure out what kind of motor we are using and integrate the motor into the design.


No comments:
Post a Comment